
Hybrid bio-inspired robotics tries not only to mimic living organisms in nature. But also to improve them to make them adaptable to multiple terrains and environments, while mechanically modular and efficient. Further, bionic robots may embed the properties of more than one biological animal, plus the technological advances for improving the bio-inspired mixed version.
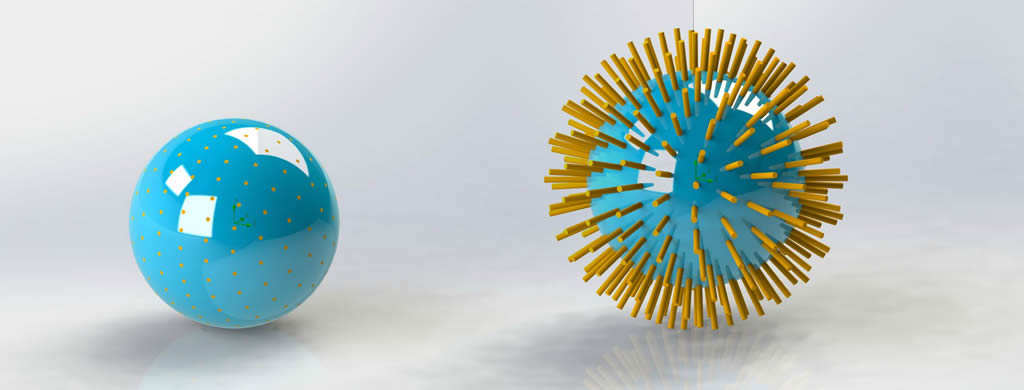
Virtual particle robot with spines commpressed inside the body (left). Extending its spines (right)
The particle robot is inspired by two simple organisms which are very similar but exist at different scales: in the macro-organism-scale, the biological sea urchins and from the micro-organism-scale by the rotaviruses, together with spherical mobile robots
Sea urchins have a round shaped body and with long spines that come off it. The spines of the sea urchin are used for multiple purposes, such as protection, to move about, and to trap food particles that are floating around in the water. Sea urchins are animals with little mobility as they move slowly with their movable spines and typically range in size from 3 to 10cm.
Viruses exist in the realm of nanometers and can be found in different shapes such as ”worms” like the Ebola virus, or more common shapes like wheels with ”legs”, i.e., HIV, influenza, corona-virus, among others. The rotavirus type resemble a ”wheel” (rotain Latin) which can rotate and extend/compressthe ”legs” (Hemagglutinin and Neuraminidase) for connecting and propelling itself in the cell’s 3D space.
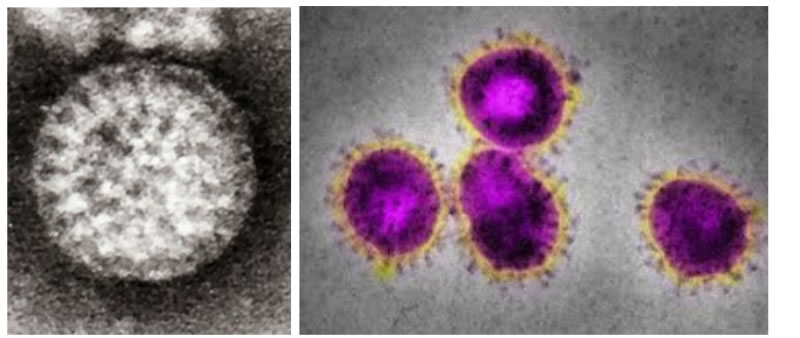
When examined by negative stained electron microscopy, rotaviruses often resemble wheels (left). Coronaviruses resembling spherical bodies with ”legs” (right).
Bio-inspired spherical mobile robots have been embedding mechatronic modifications to make them more adaptive to different terrains and environments, they can swim [3], dive from integrated thrusters [4]; move in snow from their rugged outer shell [5]; and even walk from using its shell as legs [6]; but never embedding an active exoskeleton. The main reason is the challenging mechatronic system to be fitted inside the constrained space of the robot's exoskeleton, which integrates a sealed spherical mobile robot as an inner shell together with a sensorized and actuated outer shell, plus managing their complex interactions [7].
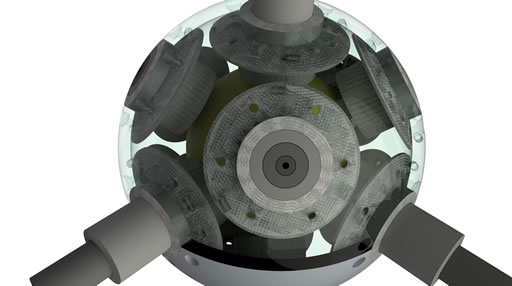
In the state of the art, there are no hybrid bio-inspired robots similar to the particle robot. The main reason is the challenging mechanical system, which mix a spherical mobile robot wearing an exoskeleton as an outer shell. With the ability to extend and contract its spines uniformly spaced on the shell. In this sense, the exoskeleton is required to minimally increase the spherical robot’s shell diameter, so the particle robot can still roll while embedding all the spherical robots properties. Otherwise, if the outer shell or exoskeleton diameter increases considerably, then the robot will not be able to roll when all the legs are contracted.


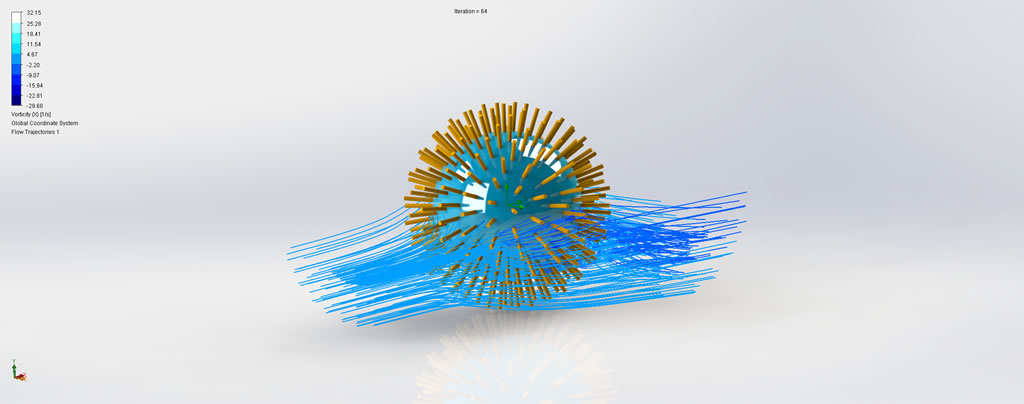
Sea urchin animal (top-left), particle robot in the bath (top-right). Computer fluid dynamic (CFD) of virtual particle robot swimming (bottom).