
The spherical robots embed a special morphology that has multiple advantages over a common legged and wheeled robots [1]: the most important is that their outer shell protects them and their motion is smooth with good power efficiency. In addition, these robots are omni-directional, meaning they can move at in any direction as any part of their outer shell can be considered as a foot, making them easy to recover after a collision and automatic adapting to soft or uneven terrains.
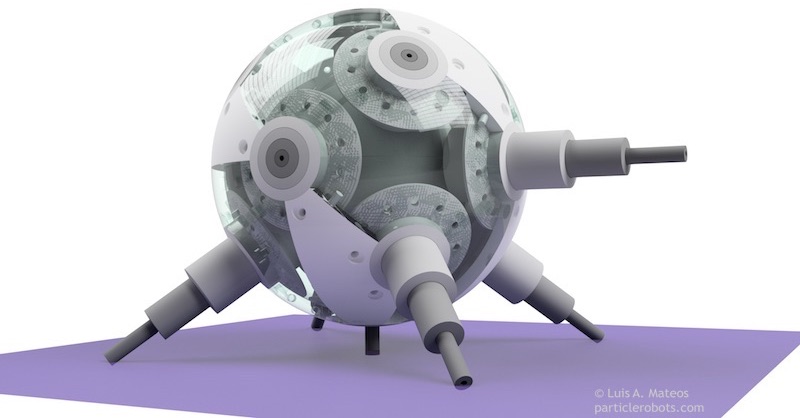
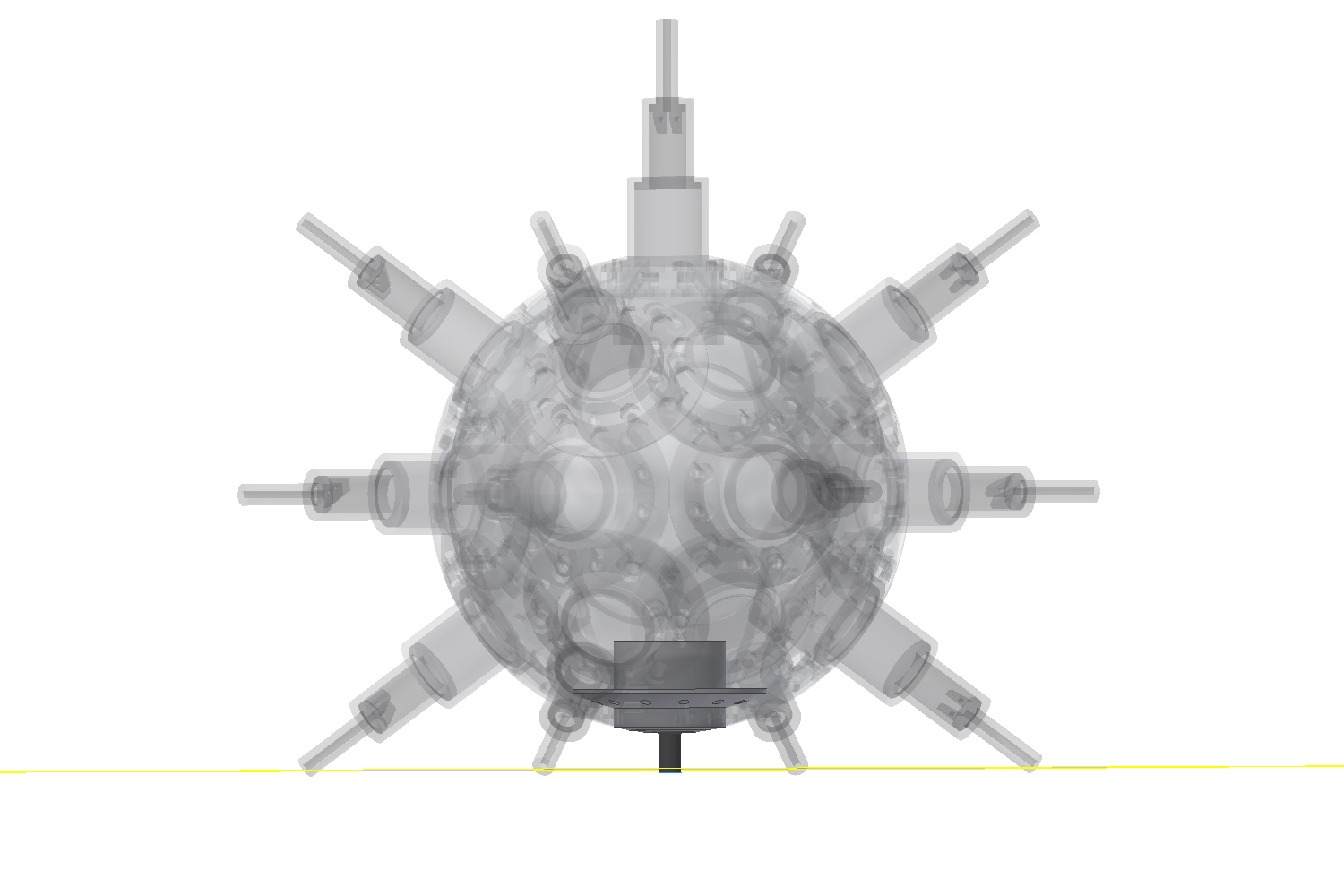
Particle robotic standing on five spines.
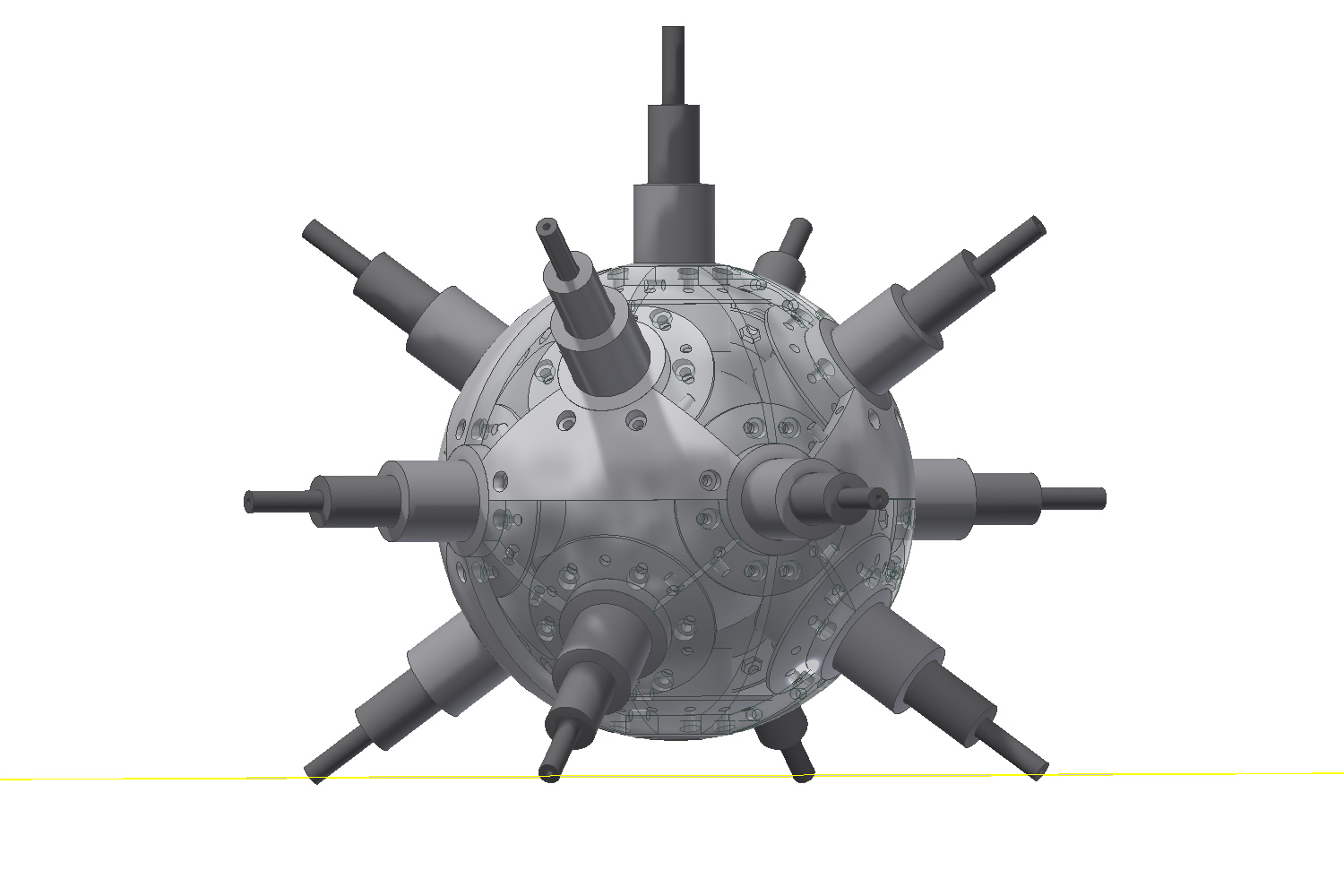
The particle robot integrates 14 linear actuators, eight of them located in the center of each octave of the sphere and the other six are located on the joining points of these octaves. Hence, the particle robot is able stand with 3, 4 or 5 spines on a flat surface and can be propelled in multiple ways.
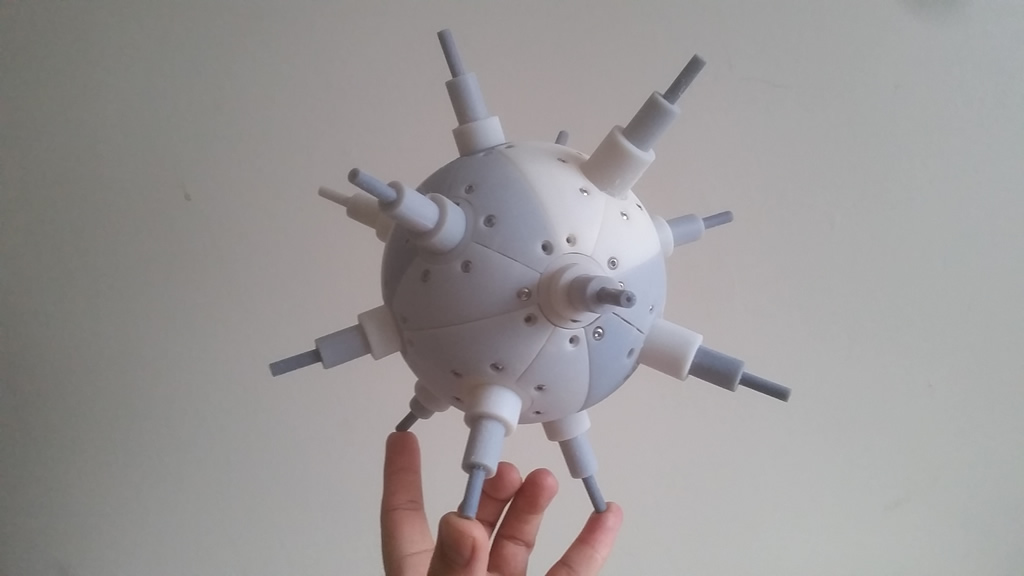
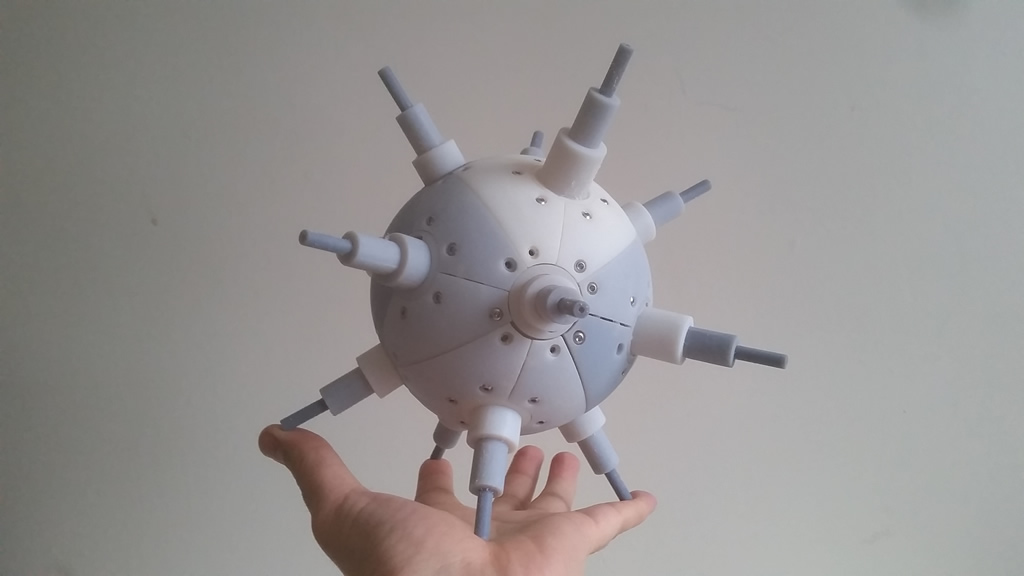
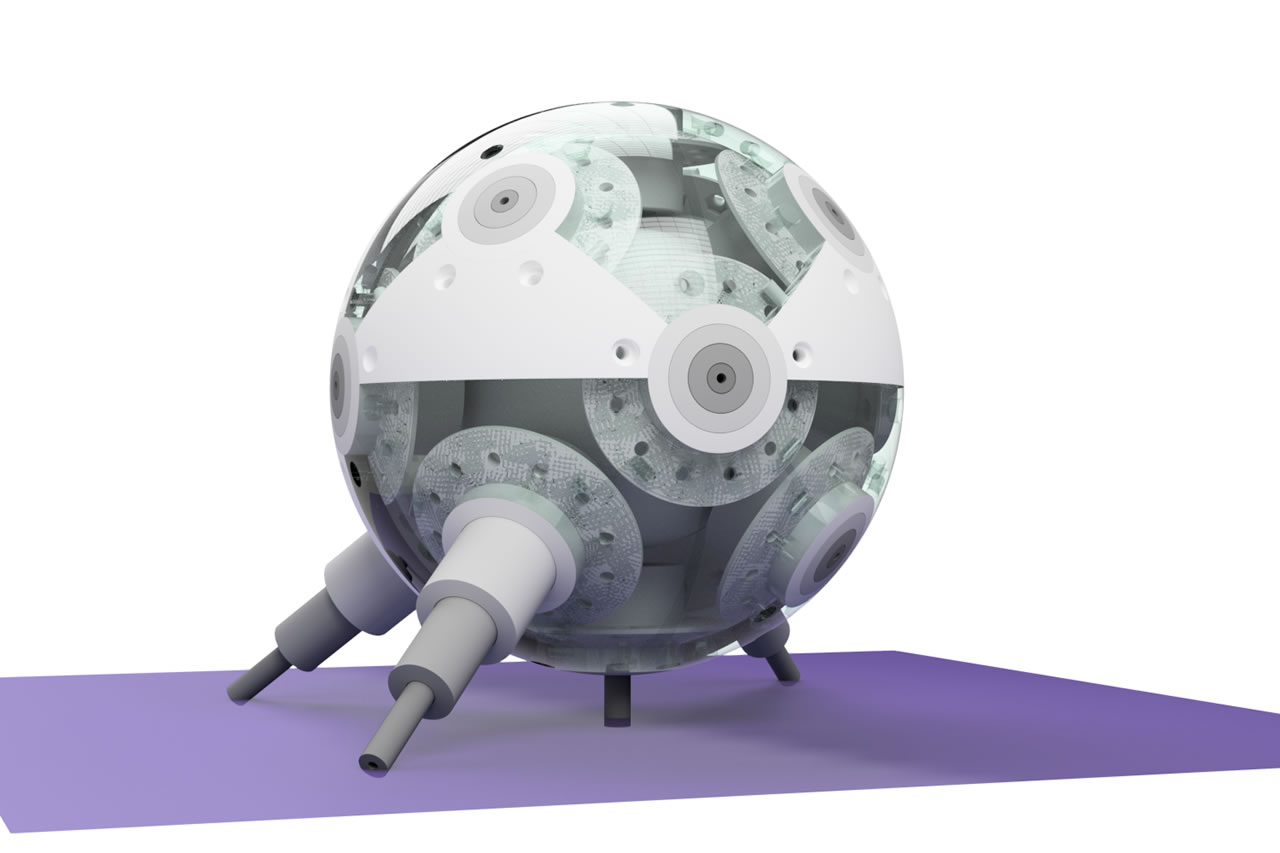
Bionic sea urchin robot standing with 3 and 4 spines.
The particle robot is able to roll in three different ways: 1) extending the telescopic actuators to propel itself, 2) with its inner spherical mobile robot, 3) combining spherical robot with telescopics.
The first locomotive configuration starts when the robot is set with four of the spines extended equally and in contact with the ground (on flat surfaces). On rough surfaces (i.e., over rocks) the robot extends the four spines until all are in contact and the inclination level of the robot is secured. In this way, the robot can be set stable to the ground level or above it. The fifth spine which is facing the ground plane, is used for lifting the robot.
Robot in resting position with four spines (left), the fifth spine propels the robot (center) and the compressing spine sets the direction (right).
Another locomotive configuration starts when all the spines compressed and with one spine facing the ground. In this case, the robot can propel by extending any two neighbor spines. In a flat surface, the robot can move towards a direction when a couple of neighbor spines (opposite to the direction to move) are extended at the same time.
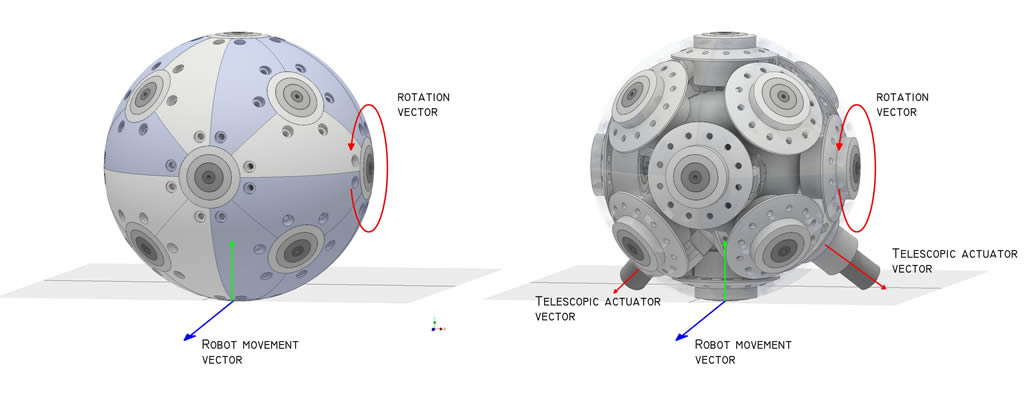
Telescopics compressed, rolling as spherical mobile robot (left). Extending the telescopic actuators to propel itself (right).
The third locomotive mode is when the robot is rolling and walking. In this mode, the robot is able to move in extreme environments such as crud snow. Where the snow gets packed in certain places, piled in others, generally an even uneven surface with slippery patches and huge lumps of powder.

Locomotion mode 3: combining spherical mobile robot with telescopic actuators.