
Once docking is done, the next step is garaging in which the vehicle is locked, securing its position. In this context, the locking mechanism can be as simple as a hook, or a more elaborated system that involve active devices, such as motorized-screws [18].
The push and lock mechanism locks progressively from the insertion of the pin with the bearing stud until it closes the socket.
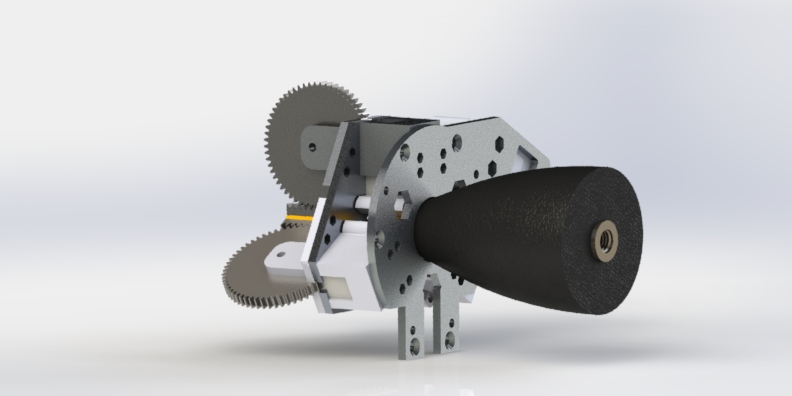
Push and lock mechanism (left). Metallic version for towing 1000Kg floating vessels(right).
Push and lock mechanism how it works.
The latching system is based on the ball and socket joint, which allows a rotation about each of the three rectangular axes. Each robotic boat integrates the two components of the spherical joint and the number of connectors can be tailored for each use case; i.e., in the towing use case, robotic boats with connectors on the front and back can latch in train link configuration and to a docking station. Moreover, if the conectors are added on the sides of the roboats, then the boats can create a floating platform. In this way, the spherical joint created between the connected roboats enables them to rotate and move on the surge and sway vectors while overcoming wave disturbances.
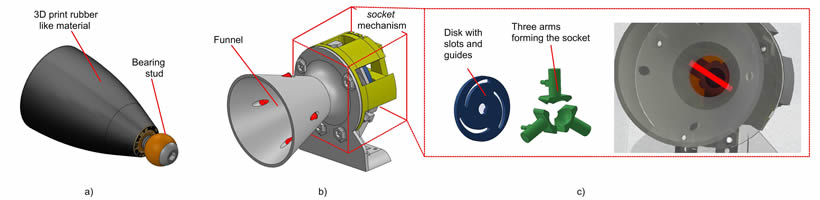
a) Passive male integrates a bearing stud on the front of the pin and 3D printed soft plastic as damping element. b) Socket (female) integrates a funnel to guide the male ball into a receptor that traps the ball. This receptor integrates a mechanism with three arms that when closed forms the ball-socket. Also, integrates a laser system to detect when the pin is inside to close the socket. c) Socket elements: disk with guides, three arms, one servomotor and the ball detection system with laser crossing the socket.
Garaging from motorized funnel.
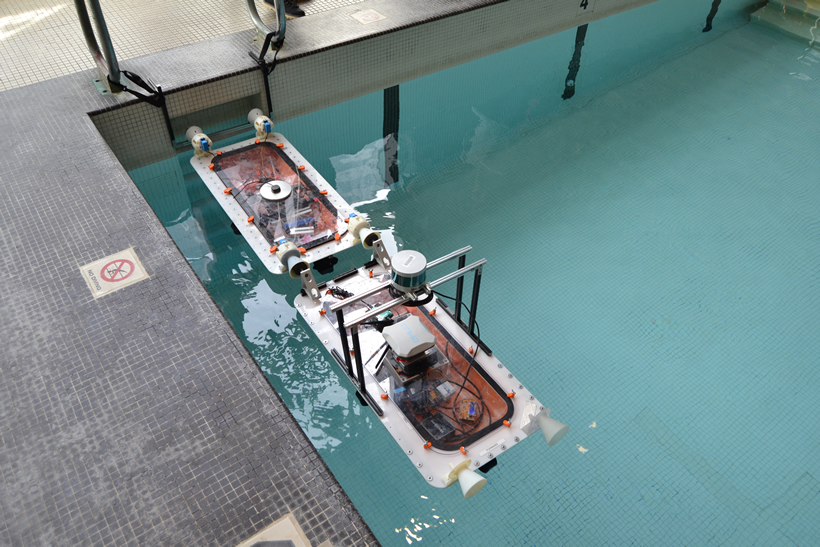
Towing with a couple of latching system (rigid connection).
Latching system towing a "balancing" roboat, towing with a single of latching system (flexible ball and socket connection).
Roboats can have higher acceptance to work along normal boats if they use the same infrastructure. The walls in the canals have stairs and rods inserted in the walls for docking boats with a rope. Roboats should try to dock in a similar way as normal boats by using the available latching points.

Boat docked with a rope to the rod in the wall (left | center). Stairs in the walls with a “no parking sign” (right).
A simple and waterproof latching mechanism able to grab a rod can enable the roboat to dock to the canal walls. This mechanism integrates only two components: a waterproof limit-switch as sensor and a waterproof servo as actuator to open/close the robotic gripper. The two components can be customized to the Amsterdam docking points. The gripper can open bigger to have a higher tolerance when looking for the rod and the gripper can be customized to any rod dimension
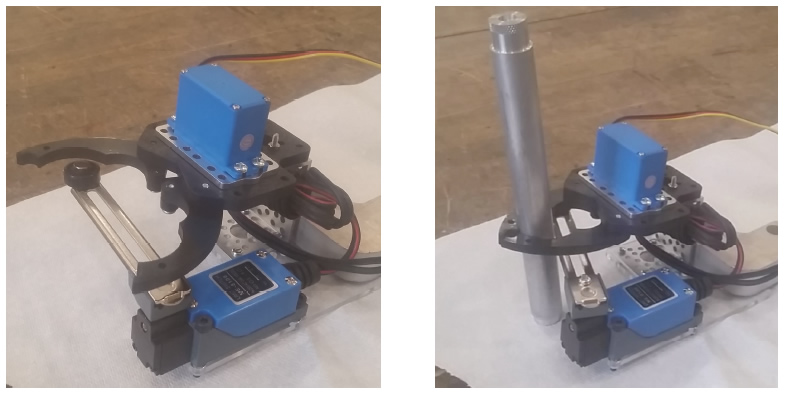
Robotic gripper with limit switch for detection of a bar (all elements waterproof IP67) (left). Robotic gripper for roboats latched to a vertical bar (right).
Robotic gripper for roboats.
If the robotic grippers are hidden inside the roboat, then the latching system becomes genderless. In this configuration, the roboat can move next to each other without hitting any latching elements, since all are inside the deck. And all genderless latching can be a male or female, enabling full multirobot configurations.
Genderless latching system how it works.
Genderless latching system for roboats.